Vũ Văn Thảo_Bộ môn Kỹ thuật điện
Đặt vấn đề.
Hiện nay, việc sử dụng các thiết bị điện điều khiển thông minh trong đời sống hàng ngày khá phổ biến do sự tiện dụng và hiệu quả với nhu cầu sử dụng. Tại một số trường Đại học đã nghiên cứu và triển khai ứng dụng hiệu quả các đề tài nghiên cứu khoa học và các cải tiến khoa học vào giảng dạy và thực hành như Đại học Bách khoa Hà Nội, Đại học Công nghiệp Hà Nội, hay Đại học Công nghiệp Dệt may Hà Nội với mạch điện điều khiển lập trình PLC...
Khi nghiên cứu về lĩnh vực điều khiển điện tự động câu hỏi đặt ra là điều khiển là gì, đối tượng điều khiển, và tại sao phải điều khiển?
Chúng ta đều biết ‘‘Điều khiển” là quá trình thu thập thông tin, xử lý thông tin và tác động lên hệ thống để đáp ứng của hệ thống “gần” với mục đích định trước. Điều khiển tự động là quá trình điều khiển không cần sự tác động của con người. Đối tượng điều khiển tùy thuộc vào lĩnh vực nghiên cứu và biến số của nó cũng phụ thuộc vào quy mô nghiên cứu. Việc điều khiển nhằm phục vụ một công việc hay nhu cầu cụ thể của con người. Mục đích của việc điều khiển các đối tượng nhằm thỏa mãn các tiêu chí về sản xuất, sự an toàn, độ chính xác và hiệu quả kinh tế.
Trong lĩnh vực điều khiển động cơ cỡ nhỏ và điều khiển chiếu sáng nhằm đảm bảo sự tiện lợi, năng suất, chất lượng và sự chính xác thường dùng bộ điều khiển lập trình PLC LOGO 230RC Siemens.
Về thông số Bộ lập trình PLC LOGO 230RC.
Model: Siemens “6ED1052-1FB00-0BA6″, Siemens LOGO “6ED1052-1FB00-0BA8″
Nguồn cấp có hai loại: Class 1 dưới 24 V, điện áp 12 V DC, 24 V DC, 24 V AC.
Class 2 trên 24 V, điện áp từ 115…240 V AC/DC.
Đối với loại Bộ lập trình LOGO 230RC thì sữ dụng nguồn cấp 115~240Vac/dc.
Loại có hiển thị: 4 ngõ ra relay 10A, 8 ngõ vào.
Các phương pháp điều khiển kết nối được thực hiện bằng điều khiển nối cứng hoặc điều khiển lập trình.
Phương pháp điều khiển nối cứng được chia ra nối cứng có tiếp điểm và nối cứng không tiếp điểm.
Điều khiển nối cứng có tiếp điểm: là dùng các khí cụ điện như contactor, relay, kết hợp với các bộ cảm biến, các đèn, các công tắc… các khí cụ này được nối lại với nhau thành một mạch điện cụ thể để thực hiện một yêu cầu công nghệ nhất định. Ví dụ như: mạch điều khiển đổi chiều động cơ, mạch khởi động sao – tam giác, mạch điều khiển nhiều động cơ chạy tuần tự…
Đối với nối cứng không tiếp điểm: là dùng các cổng logic cơ bản, các cổng logic đa chức năng hay các mạch tuần tự (gọi chung là IC số), kết hợp với các bộ cảm biến, đèn, công tắc… và chúng cũng được nối lại với nhau theo một sơ đồ logic cụ thể để thực hiện một yêu cầu công nghệ nhất định. Các mạch điều khiển nối cứng sử dụng các linh kiện điện tử công suất như SCR, Triac để thay thế các contactor trong mạch động lực.
Trong hệ thống điều khiển nối cứng, các linh kiện hay khí cụ điện được nối vĩnh viễn với nhau. Do đó khi muốn thay đổi lại nhiệm vụ điều khiển thì phải nối lại toàn bộ mạch điện. Khi đó với các hệ thống phức tạp thì không hiệu quả và rất tốn kém.
Đối với phương pháp điều khiển lập trình được thì ta có thể sử dụng những phần mềm khác nhau với sự trợ giúp của máy tính hay các thiết bị có thể lập trình được trực tiếp trên thiết bị có kết nối thiết bị ngoại vi. Ví dụ như: LOGO!, EASY, ZEN...
Chương trình điều khiển được ghi trực tiếp vào bộ nhớ của bộ điều khiển hay một máy tính. Để thay đổi chương trình điều khiển ta chỉ cần thay đổi nội dung bộ nhớ của bộ điều khiển, phần nối dây bên ngoài không bị ảnh hưởng. Đây là ưu điểm lớn nhất của bộ điều khiển lập trình, mặt khác giao diện Bộ lập trình PLC LOGO 230RC thân thiện có thể điều khiển bằng tay hoặc lập trình một cách dễ dàng nên được sử dụng rộng rãi.
1. Viết chương trình điều khiển đèn chiếu sáng
a. Yêu cầu công nghệ
Hàng ngày: đèn lộ 1 sáng từ 18h00 đến 22h00, đèn lộ 2 sáng từ 18h00 đến 06h00 hôm sau.
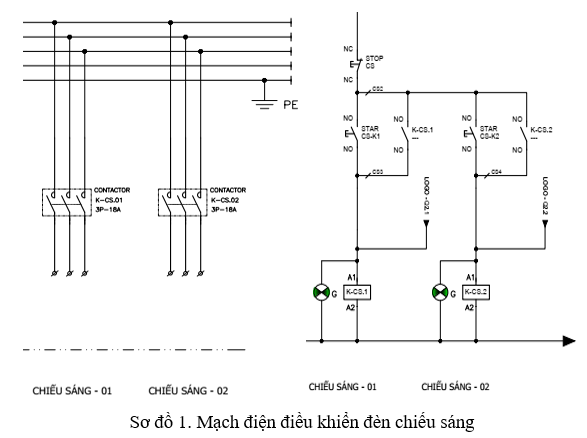
b. Sơ đồ mạch điều khiển
 c. Các bước thực hiện
c. Các bước thực hiện
Bước 1: Liệt kê tín hiệu vào ra
Ở chương trình điều khiển này ta sử dụng Q1, Q2 kết hợp với 2 hàm thời gian để khống chế thời gian theo ngày trong tuần.
Q1: tín hiệu ra cấp nguồn cho đèn lộ 1
Q2: tín hiệu ra cấp nguồn cho đèn lộ 2
I3: Nguồn cấp chiếu sáng
Bước 2: Viết chương trình điều khiển
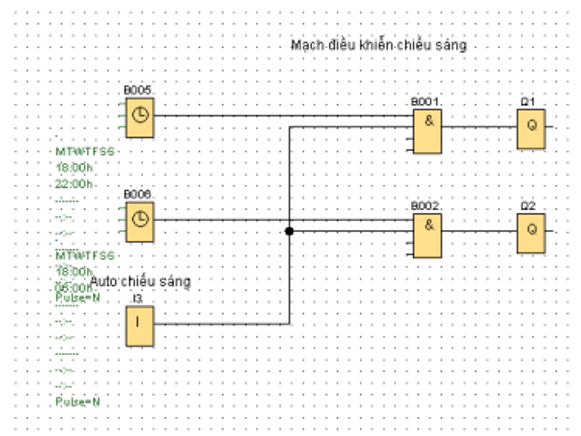 Sơ đồ 2. Mạch điện FBD điều khiển đèn chiếu sáng
Sơ đồ 2. Mạch điện FBD điều khiển đèn chiếu sáng
Khối B005 đặt thời gian cho cấp điện cho Q1, Khối B006 đặt thời gian cho cấp điện cho Q2
Q1 có điện khi khối B001 nhận mức logic 1, Q2 có điện khi khối B001 nhận mức logic 1.
Bước 3: Kết nối phần cứng
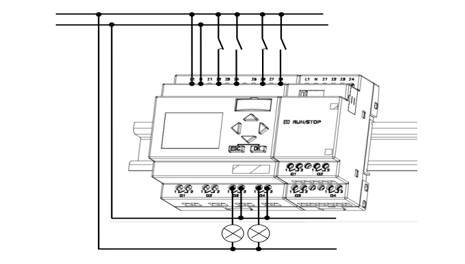
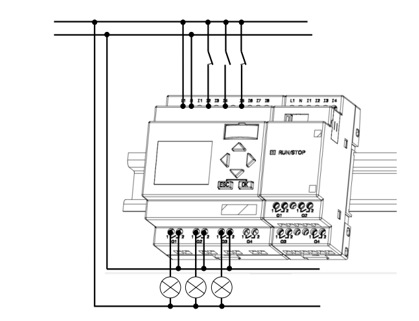
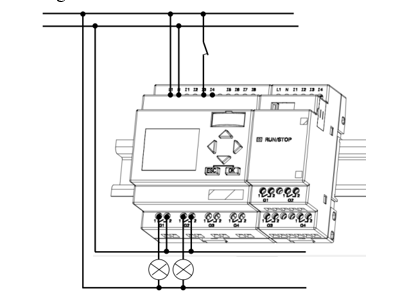 Sơ đồ 3. Mạch điện đấu nối phần cứng điều khiển đèn chiếu sáng
Sơ đồ 3. Mạch điện đấu nối phần cứng điều khiển đèn chiếu sáng
2. Viết chương trình điều khiển động cơ KĐB 3 pha làm việc theo trình tự
a. Yêu cầu công nghệ
Nhấn StartTT-01: động cơ 1 hoạt động, nhấn StartTT-02: động cơ 2 hoạt động, động cơ 2 chỉ hoạt động khi động cơ 1 hoạt động
Nhấn Stop: động cơ 1 và 2 dừng.
b. Sơ đồ mạch điều khiển
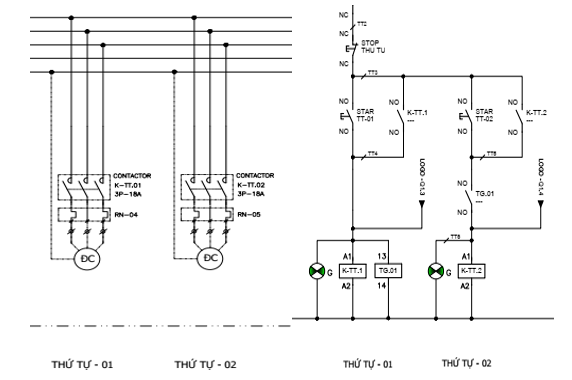 Sơ đồ 4. Mạch điện điều khiển động cơ KĐB 3 pha làm việc theo trình tự
Sơ đồ 4. Mạch điện điều khiển động cơ KĐB 3 pha làm việc theo trình tự
c. Các bước thực hiện
Bước 1: Liệt kê tín hiệu Vào/ra:
I4: Start TT-01
I8: Start TT-02
I2: Stop auto-man
I6: Stop TT
Q3: Cấp nguồn cho Contactor K.TT.1 cấp điện cho động cơ 1
Q4: Cấp nguồn cho Contactor K.TT.2 cấp điện cho động cơ 2
Bước 2: Viết chương trình điều khiển
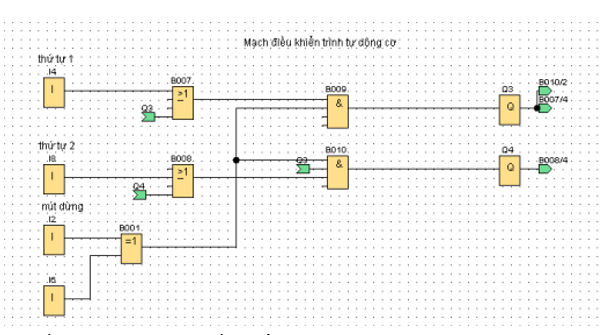 Sơ đồ 5. Mạch điện FBD điều khiển động cơ KĐB 3 pha làm việc theo trình tự
Sơ đồ 5. Mạch điện FBD điều khiển động cơ KĐB 3 pha làm việc theo trình tự
Khối B007: cấp nguồn từ đầu vào I4 và nhận mức logic 1 duy trì khi Q3 có điện.
Khối B008: cấp nguồn từ đầu vào I8 và nhận mức logic 1 duy trì khi Q4 có điện.
Khối B009: nhận mức logic 1 từ đầu ra khối B007 và nút nhấn stop thứ tự, Q3 có điện khi khối B009 nhận mức 1.
Khối B010: nhận mức logic 1 từ đầu ra khối B008 và nút nhấn stop thứ tự, Q4 có điện khi khối B010 nhận mức 1.
Khối B001: nhận mức logic 1 khi một trong hai đầu vào I2, I6 nhận mức logic 1; B001 = 0 khi cả I2, I6 đều bằng 1 hoặc 0.
Bước 3: Kết nối phần cứng
 Sơ đồ 6. Mạch điện đấu nối phần cứng điều khiển động cơ KĐB 3 pha làm việc theo trình tự
Sơ đồ 6. Mạch điện đấu nối phần cứng điều khiển động cơ KĐB 3 pha làm việc theo trình tự
3. Viết chương trình mạch điện điều khiển khởi động động cơ KĐB 3 pha bằng đổi nối Y / D
a. Yêu cầu công nghệ
Nhấn start Sao-TG động cơ chạy sao, contactor K-1, K-3 đóng, sau 10s K-3 mở, k-2 đóng.
Nhấn Stop Sao-TG động cơ dừng.
b. Sơ đồ mạch điều khiển
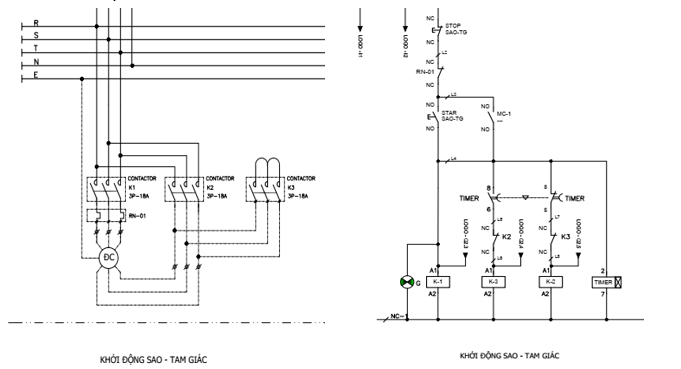 Sơ đồ 7. Mạch điện điều khiển khởi động động cơ KĐB 3 pha bằng đổi nối sao - tam giác
Sơ đồ 7. Mạch điện điều khiển khởi động động cơ KĐB 3 pha bằng đổi nối sao - tam giác
c. Các bước thực hiện
Bước 1: Liệt kê tín hiệu vào ra.
I4: Start chạy sao - tam giác
I2: Stop auto-man (dừng sao - tam giác)
I5: Stop Sao-TG
Q1: Contactor duy trì
Q2: Contactor chạy tam giác
Q3: Contactor chạy sao
Bước 2: Viết chương trình điều khiển
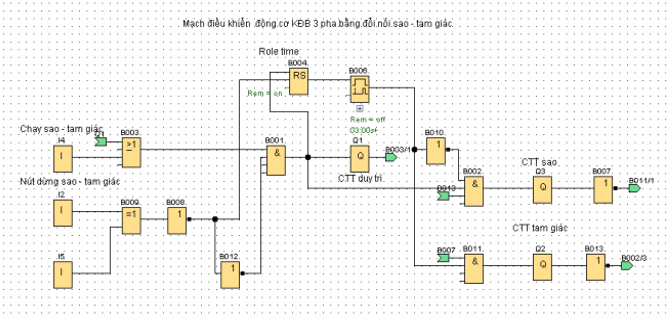 Sơ đồ 8. Mạch điện FBD điều khiển khởi động ĐC KĐB 3 pha bằng đổi nối sao - tam giác
Sơ đồ 8. Mạch điện FBD điều khiển khởi động ĐC KĐB 3 pha bằng đổi nối sao - tam giác
Khối B003 nhận tín hiệu đầu vào I4 và duy trì mức logic 1 cho Q1, B001 nhận mức logic 1 khi B012=0, B005=0, B008=1; Q1 =1 chỉ khi B001=1.
Khối B004 nhận tín hiệu từ B001, B005 duy trì cấp tín hiệu cho khối B006 đặt thời gian cho khối Q3; Q3=1 khi B010=0, B002=1.
Khối B011 nhận tín hiệu thời gian đặt từ B006 và đạt mức logic 1 khi B007=0, Q2=1 chỉ khi B011=1.
Khối B009: nhận mức logic 1 khi một trong hai đầu vào I2, I5 nhận mức logic 1; B001 = 0 khi cả I2, I5 đều bằng 1 hoặc 0.
Bước 3: Kết nối phần cứng
 Sơ đồ 9. Mạch điện đấu nối mạch khởi động ĐC KĐB 3 pha bằng đổi nối sao - tam giác
Sơ đồ 9. Mạch điện đấu nối mạch khởi động ĐC KĐB 3 pha bằng đổi nối sao - tam giác
Kết luận.
Từ những ứng dụng như trên có thể thấy lập trình điện cỡ nhỏ có thể sử dụng vào điều khiển chiếu sáng, điều khiển động cơ theo trình tự, khởi động động cơ sao – tam giác hoặc đảo chiều quay động cơ, hãm động cơ.... Các lĩnh vực điều khiển phức tạp có thể sử dụng lập trình PLC kết hợp biến tần, điều này đòi hỏi người lắp đặt phải có kiến thức sâu rộng về lĩnh vực nghiên cứu và phải được đào tạo chuyên sâu trong các cơ sở đào tạo.
TÀI LIỆU THAM KHẢO
1. Nguyễn Đình Chung (2012), Giáo trình PLC Logo!
2. Hướng dẫn sử dụng LOGO! – Công ty TNHH TM&DVKT S.I.S
3. Nguyễn Hữu Phước (2002 ), Tự động hóa với PLC của Siemens. NXB KHKT